
Overview
CNC instrumentum machinae est applicatio integralis mechanicae, electricae, hydraulicae, pra- umaticae, microelectronicae et informationes et aliae technologiae ut unum ex integratione electrom- echanica productorum, in mechanica fabricandis instrumentis flexilibus, universalibus, alta praecisione, summus. efficientiam "flexibilem" instrumenti productionis latae, erit processus varias operationes et gradus requisitus et figura et magnitudo operis in workpi-ece, cum codice digitale, Per imperium medium in numerum imperium fabrica, numerus imperium fabrica ad input informationem. processus et calculus, imperium machinae instrumentum systematis et partes expelle, processus automatice inquisiti workpiece. Articulorum machinarum technicae CNC apparatus eiusque recipis in output ac summa possessione instrumentorum machinarum metalli secantium est unum e magnis indicibus ut metiaris altiorem gradum progressionis oeconomici nationalis et industrialis fabricandae regionis. Superioribus annis, communicatio instrumentorum machinarum CNC machinarum in conatibus Sinensium increvit per singulos annos, et adhibita est in magnis et mediocribus inceptis, et etiam plerumque in parvis et mediocribus conatibus usus est et etiam singula incepta.
CNClathe processus opus
- Cum workpiece a CNC torno discursum est, copia cibariorum magna est, celeritas processing humilis est, et processus machinis ictum oneris ob inaequalis superficiei workpieces habet.
- Lathefinishing, nutrimentum moles parva est, ut efficiendi processus curet, pro- cessus celeritas alta est.
- Motricium fusum necesse est habere levem celeritatem et altae torques output, et est stab-le, et potest currere ad altam celeritatem.
- Analog acceptis significationibus alta linearity et humilis sarcina impedimentum requirit.
- Themotor strepitus parvus est, et impedimentum instrumenti automationis systematis est parvum. Dimitte sursum et quam minimum accelerare.
Commoda CNClathe KD600 seriei productorum
Series Kd600 summus perficientur vector invertor progressionem technologiam moderatricem adoptat, motor torques humilis celeritas magna est, celeritas accuratio alta est, pretium rationabilis, munus completum est, cum momentanea potentia defectus processus ac celeritas sequi ac rursus munus incipere , curare ut ratio continuae operationis mechanismum perficiat, ut motor currit ad summam efficientiam, ergo series KD600 summus perficientur vector invertitur loco fusi AC servo systematis optima electio ad instrumentum machinae industriae. Series KD600 inversus has notas sequentes habet:
- Unicum debilis technologiae magneticae imperium: potest esse bona moderatio frequentiae minoris magnae motoris torques, potest currere in 0~ 600Hz.
- Celeritas sistenda velocitatis: magneticae fluxum retardationis technologiae sistendi motorem tardum facere et breviore tempore sistere potest.
- Celeritas accurationis et stabilitatis: linearitas celeritatis occasus bona est, accuratio stabilitatis velocitatis alta est, et fluctuatio celeritatis intra 5/1000 cum onere mutatur.
- Optimum humilis frequentia effectus: Optimized PG vector imperium algorithmus, humilis frequentia 1Hz usque ad 150% aestimavit torques output, ut fortis secans vim in processu blank.
- Multiplicem frequentiam initus modi: 2 fontes voltage 0 ~ 10V vel -10V ad +10V input, 1 vena fontis 4~20mA vel 0~20mA input.
- Amplis applicationis intentione eget: Provectus consilium virtutis switching ad varios ambitibus eget applicari potest.
- Exquisitus processus productionis: processus efficiens unicam crassantem, ductus aeris ab interno PCB penitus semotus est, et validam aptam habet ad duram corporis ambitum sicut metalli pulvis, gas mordax, et humiditas.
- Constructum in ambitu lacus effusio multum minuit impulsum electricum in corpus humanum cum apparatu habitationi oneratur.
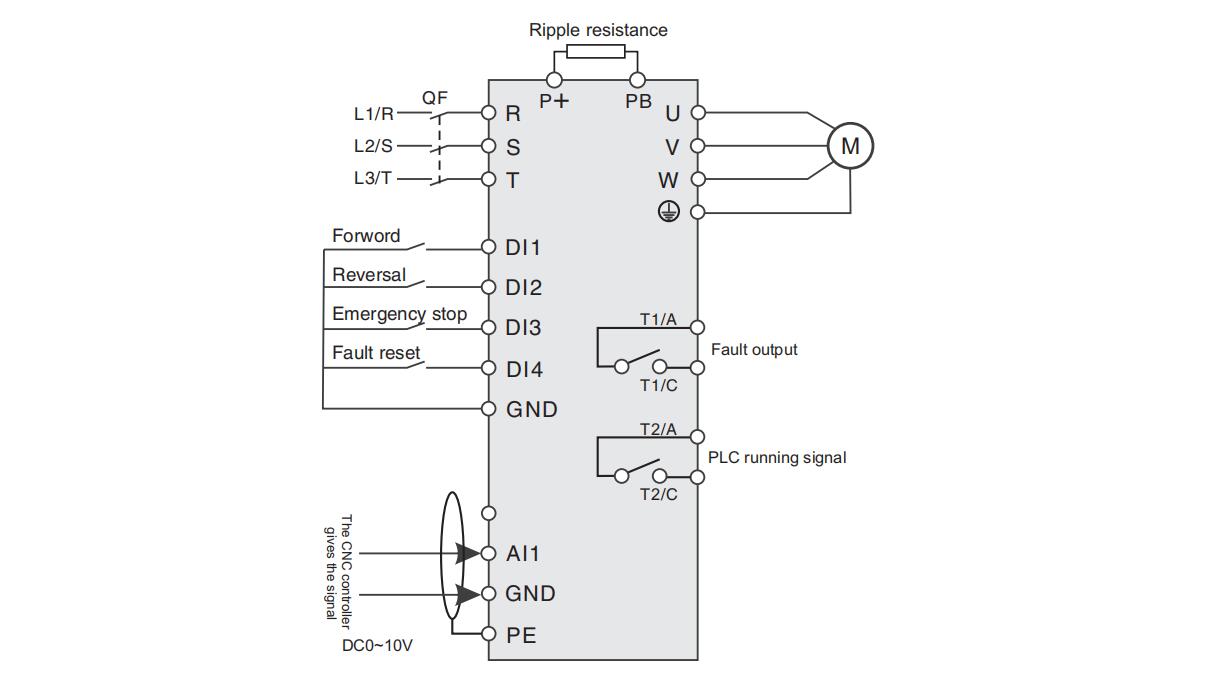
Basic wiring diagram
Parameter Occasus et descriptio
| Parameter occasus | Instructiones | Parameter occasus | Instructiones |
| P0-03 = 1 | Non PG vector modus | P4-01=11KW | Rated potentia motoris |
| P0-04 = 1 | Externus terminus incipit seu desinit | P4-02= 380V | Rated voltage of motricium |
| P0-06=2 | Analoga quantitas AI1 datur | P4-04=22.6A | Rated current motoris |
| P0-14=150 | Maxime output frequency | P4-05=50Hz | Rated frequentia motoris |
| P0-16=150 | Superiores operating frequency modus | P1-06=1435RPM | Rated celeritas motricium |
| P0-23=1.0 | Acceleratio tempus | P6-00=2 | Culpa output |
| P0-24=0.8 | retardatio temporis | P6-02=1 | Frequency converter in operationem |
| P5-00=1 | Deinceps cursus | P5-01=2 | run invertitur |
| P4-01 ~ P4-06 motore parametri quaeso intra accurate | |||
Debugging exitum
Probatum est seriem KD600 summus perficientur vector frequentiam convertentem posse plene requisitis machinae instrumenti fusi potestate occurrere. KD600 ducit modum ducens PG-vectoris liberi moderaminis, qui potest leviter outputare 150% torques vel sub celeritatis (low frequentia) operandi ut occurrat necessitates processus diversarum partium, et omnino substituere potest traditionalem volubilem structuram gerentem fusum, et hoc fusum. structuram esse simplicem, compactam, veramque instabilem celeritatem expers consequi posse. Celeritas huius fusi ab externo analogo regitur signo ut output frequentiam moderaretur in diversis processibus processus (exempli Roughing, finiendi, etc.) diversa velocitate indigent, hoc tempore ratio numeralis in diversis significationibus voltages analogis praeponere potest. invertitur ad varias celeritates consequendas, et signum initium ac sistendum est etiam moderatio ratio numerica, quae gradum automationis auget et instrumentum vitae servitutis extendit.

Post tempus: Nov-17-2023